I'm a Robotics Engineer who is excited about a world where robots and humans coexist and cooperate across a variety of tasks, boosting productivity, safety, and efficiency. My research interests center on robot autonomy, with a particular focus on embodied AI, robot learning, perception, and control theory. I also hold a keen interest in AI methods and applying machine learning to real-world problems across different domains.
I completed my M.S. in Robotics from the Georgia Institute of Technology, Atlanta, GA, USA, and my B.S. in Electrical Engineering with double minors in Physics and Mathematics from Habib University, Karachi, Pakistan.
Beyond technology, I love to travel solo ✈️, capture moments through photography 📸, and try out new sports 🏓🏊. I'm also a passionate cricket fan 🏏, enjoy playing cards ♠️, and have recently developed an interest in chess ♟️.
➡️ Scroll down to learn more about my past research work, academics, teaching, and professional work experience.
Research & Publications
Legged Robot Navigation in Uncertain Terrains using Deep Reinforcement Learning
Georgia Institute of Technology · Research Project
Developed a dynamic, vectorized RaiSim environment and integrated deep reinforcement learning (PyTorch) to train a navigation policy on top of a low-level locomotion controller. Designed custom rewards to optimize point-to-goal navigation. Created diverse terrains and explored motion planning (RRT, A*) and dataset generation for imitation learning. Gained expertise in robot kinematics and frame transformations for legged robots.
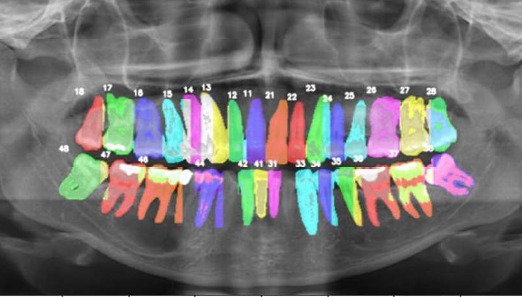
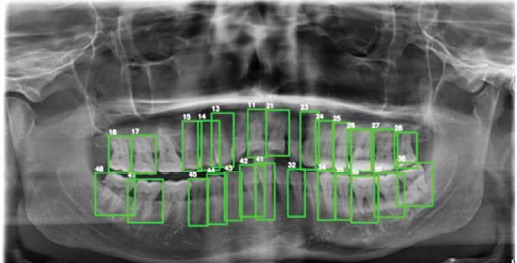
An AI Model for Instance Segmentation and Tooth Numbering on Orthopantomograms
International Journal of Computerized Dentistry (2023) · Niha Adnan, Waleed Bin Khalid, Fahad Umer
Worked with a team of dentists at one of the leading hospitals in Pakistan to develop a deep-learning pipeline for teeth segmentation and labeling using U-NET and FRCNN. An Orthopantomograms (OPGs) dataset was self-annotated & processed for the project using PIL, numpy, JSON & OpenCV.
Designed and developed a contactless vitals measurement robot equipped with an Ackermann drive for my undergraduate final year project. The robot utilised a camera, machine learning, and signal processing to measure vitals and decrease medical staff contact time with contagious patients. The system reported around 70% accuracy for Blood Pressure, and 90% for Heart Rate, Oxygen Saturation, and Temperature. I presented the work as the first author at ICARA 2022 and received the Best Capstone Project award for this work.
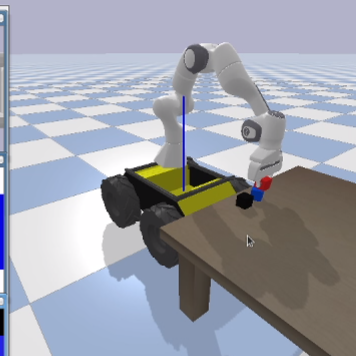
TAMP for Mobile Manipulation using Perception, LLMs and Motion Planning.
LLMs, Task and Motion Planning (TAMP), Kinematics, Perception, PyBullet Simulation
Building a bottom-up simulation framework for mobile manipulation in PyBullet, to study and understand Task and Motion Planning (TAMP) for robotic systems like a mobile manipulator. A Clearpath Husky base with a Franka Panda arm executes multi-step language instructions by combining LLM-based task planning with end-effector camera perception and IK motion execution. The system successfully achieves reliable single-cube picks and two-cube stacking, while multi-cube stacking reveals challenges such as motion smoothness, base drift, and grasp retries. This ongoing project not only demonstrates the integration of symbolic task planning with continuous control but also serves as a platform to study richer perception, collision-aware motion planning, feedback-driven correction, and vision–language grounding to push toward general-purpose mobile manipulation.
This project is currently ongoing and further updates will be made as I progress.
Demo videos of picking single cube and stacking 2 cubesHusky + Franka Emika Arm platform
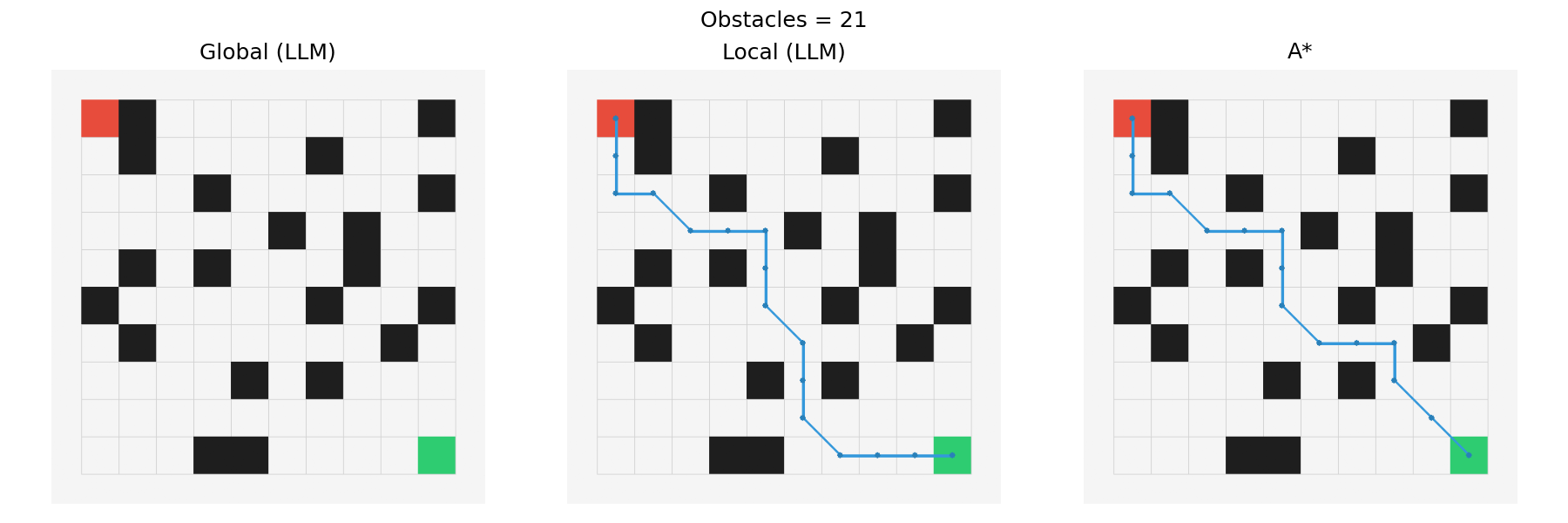
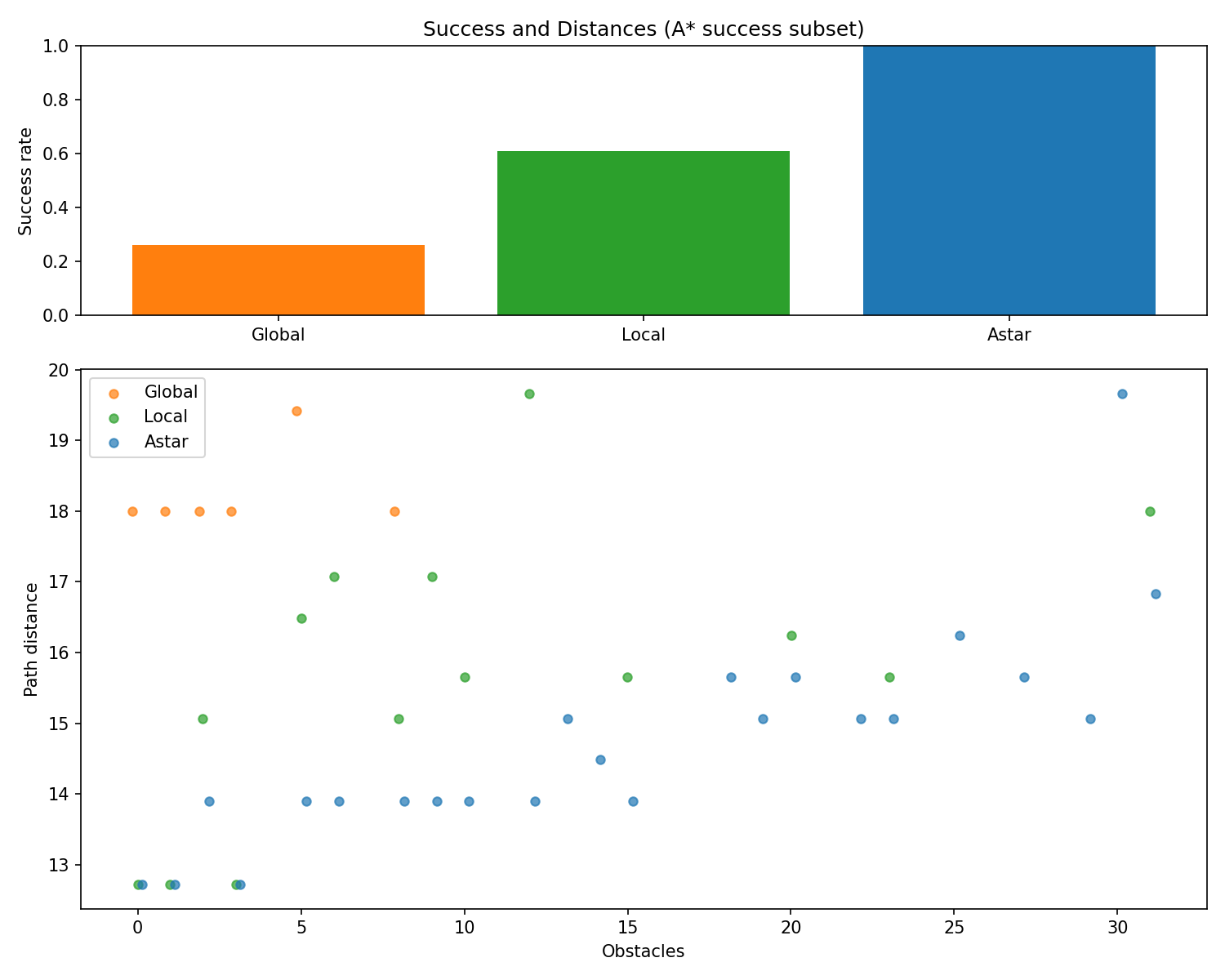
LLM-Based Path Planning in Grid Worlds: Local and Global Policies vs A* Baseline
LLMs, A* Search, Hybrid Planning, Grid Navigation
Working on this project to understand and study how LLMs can be used for path planning. Current findings are that vanilla local policies achieve around 60% success on A*-solvable cases, while vanilla global one-shot planning reaches only about 25% and degrades more quickly as obstacle density increases. These initial results highlight the relative resilience of local prompting, but the work remains ongoing. I am systematically exploring improvements through richer local contexts (e.g., 5×5 windows, clearance features), prompt refinements (few-shots, ranking), and hybridization with classical priors (subgoal induction, A* cost-to-go). The broader goal is to examine how far prompt engineering and minimal feature additions can push LLM-based planning toward reliable performance, and to assess the feasibility of such methods for robotic path planning in more realistic settings.
This project is currently ongoing and further updates will be made as I progress.
Comparison of Global, Local and A* Policy with 21 random obstaclesAggregate Results Summary
Implemented RRT from scratch with custom collision detection conditions to move a 3 link arm in the presence of obstacles and walls. Simulated the environment and robot using PyGame and tuned RRT and PID parameters for optimal performance in varying configerations. Implemented the forward and inverse kinematics from scratch to compute path variables. Created multiple demos, to show different aspects such as wrist limitations, reachable space considerations, and RRT performance.
Robot Maze Navigation for Variable Maze Structures
CNNs, ROS 2, Path Planning
Tackled the challenge of navigating an unknown maze by implementing a combination of the Bug algorithm, collision avoidance, and CNN-based image classification to create a solution invariant to the maze structure, starting point, and end point. Optimized a CNN to detect signs with 99% accuracy by augmenting for invariance and extensively preprocessing the data. The motion plan integrated CNN-generated maneuvering commands, lidar-based wall detection for collision avoidance, the Bug algorithm as a fallback, and PID control to ensure accurate straight-line movement and sharp turns, achieving 100% navigation success.
Video
Learning Robot Tasks From Videos
RL and IL, Open AI Gym, Transformers, ManiSkill2 dataset
Studied manipulator control using reinforcement and imitation learning via MLPs, CNNs, and transformers on the ManiSkill2 dataset. Mitigated covariate shift in the Franka Emika Panda Arm’s pick-and-place task through an encoder transformer for behavior cloning, achieving a 20% success rate with imitation learning, with 80% showing either correct picking or placing. Implemented PPO-based reinforcement learning control, achieving 100% task success for a selected task.
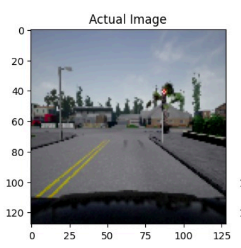
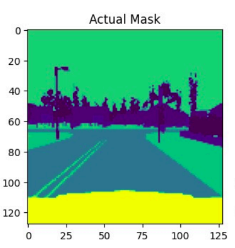
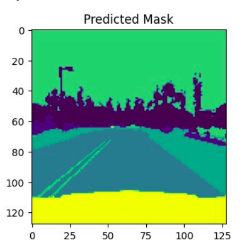
Road Image Segmentation with Supervised & Unsupervised Methods
Supervised & Unsupervised ML, CARLA dataset
Deployed supervised and unsupervised methods like K-Means, DB Scan, Gaussian Mixture Models, and U-NET for segmenting road images from the CARLA dataset. Achieved a 95% Dice Score using U-NET for instance segmentation and a Silhouette Coefficient of 0.5 with K-Means and Gaussian Mixture Models.
Developed a 2D map by teleoperating the robot in both physical and Gazebo environments, utilizing the Cartographer algorithm. Tuned ROS2 SLAM parameters to ensure the robot could smoothly traverse the map and autonomously navigate to three randomly provided locations within a 7x6 feet arena with barriers.
HardwareSimulation
CartPole Control using Deep Reinforcement Learning
DQN, DDQN, Dueling DDQN, CNN-DQN, PPO
Conducted a comparative study of Deep Q-learning, its variations (DQN, DDQN, Dueling DDQN, CNN-DQN), and Proximal Policy Optimization (PPO) on the classical CartPole control problem using OpenAI Gym. Results showed that PPO and DDQN achieved perfect scores of 500 across 100 episodes, outperforming DQN variations. CNN-DQN struggled with convergence, while PPO demonstrated superior stability by preventing drastic policy changes. The study provided valuable insights into the performance differences of policy-based and Q-learning methods for reinforcement learning tasks.
Implemented legged robot control with RL, curriculum learning, and custom reward functions to make a quadruped robot move over obstacles with increasing height. Implemented two walking modes (normal and stealthy) for a humanoid robot using imitation learning and reference state initialization.
Video
Diffusion Model as Robot Action Policy
IL, Robot Task Planning, Diffusion
Implemented a diffusion model to imitate demonstrations and model action distribution given states, obtaining 100% accuracy in guiding a point agent to push a T-shaped block onto a T-shaped outline.
GIF 1GIF 2GIF 3
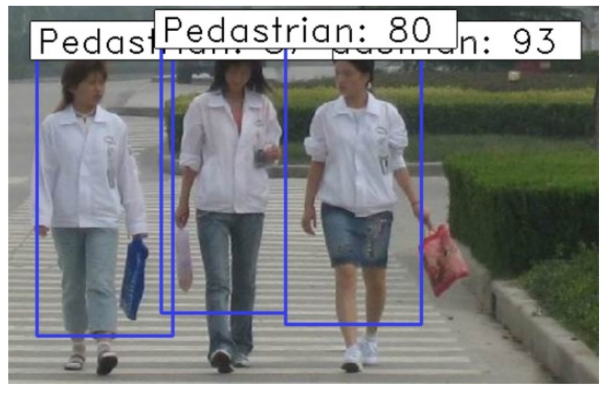
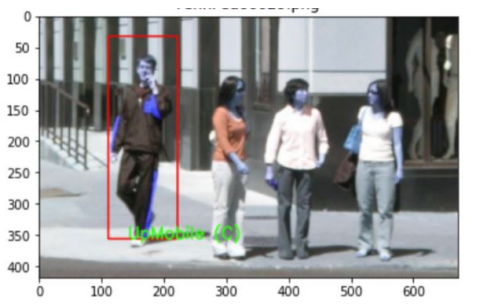
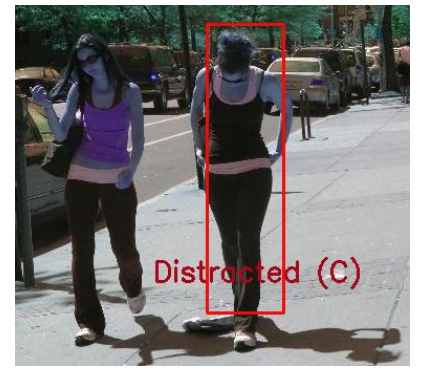
Pedestrian Behaviour Classification
Detection + Transfer Learning (VGG16)
Prepared a pedestrian image dataset by combining data from various sources and annotating pedestrian state as distracted or non-distracted. Detected pedestrians with 100% accuracy via FRCNN and identified distraction with 90% accuracy via transfer learning with VGG16.
Arduino, IR sensors, encoders, differential drive, PID
Developed a robot using Arduino, IR sensors, self-fabricated motor drivers, and regulators with discrete components. Implemented differential drive for mobility and a flywheel mechanism for shooting. Calibrated motor encoders to ensure accurate odometry readings, enabling the robot to autonomously traverse a 4x8 feet arena and drop balls into four hoops within three minutes, guided by line-following and PID control.
Video
HAWAI FIRING: Shooting Game (C++)
SDL 2.0 · OOP design · UML
Developed a bubble shooting game using C++ and the SDL 2.0 library to practice OOP design principles, clean code practices, and maintainability through UML diagrams. Created the game from scratch, including multiple levels, menu screens, saving mechanisms, and object graphics. Implemented game physics using kinematic principles and collision detection strategies.
Video
Research Paper Reflections
I have had opportunities to read and reflect on a number of
state-of-the-art papers recently. I’m documenting my reviews and reflections
as concise write-ups and presentation slides. I also plan to convert this
section into a blog and implement selected findings in code where feasible.
Work Experience
Software Engineer (April 2025 - Present)
Borderless, Remote (Freelance)
Led ideation to translate client needs into a scalable web solution, developed with Python (Flask), HTML, CSS, JavaScript, and deployed
on AWS Lightsail. Engineered a Mapbox-based interactive globe enabling filterable data visualization to drive thematic storytelling.
Working on the backend to support content automation and transition from manual Excel-based workflows to a database-driven system.
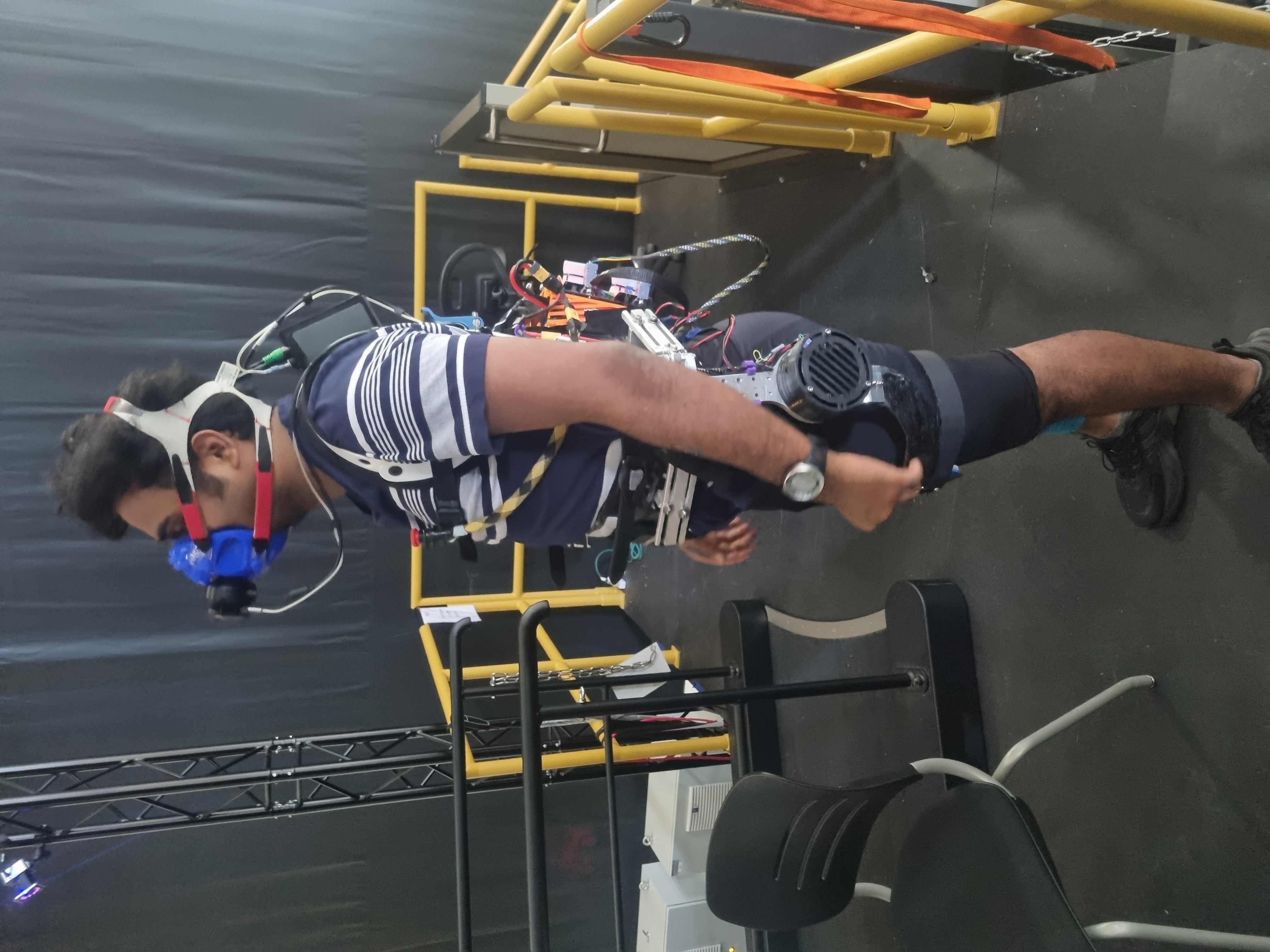
Summer Intern at EPIC Lab (May 2023 - August 2023)
Georgia Institute of Technology, Atlanta, GA, USA
Worked with a Ph.D. student to enhance the circuit and mechanical design quality of a hip exoskeleton, resolving electronic and mechanical design issues by cleaning up circuits, fabricating new PCBs, 3D-printing worn-out clippers, and reinforcing components to reduce vibrations and eliminate circuit failures. Concurrently conducted data collection, amassing 60 hours of respiratory and EMG data from human subject trials, required by lab researchers to assess metabolic costs and muscle activity.
Spearheaded the establishment of a new robotics lab by creating an experiment bench with PhantomX
manipulators and Intel RealSense D435i. Enabled students to test their robots for a robo soccer project by engineering a 6x8 feet robot tracking
arena using Python, C, and camera vision.
Teaching Experience
Graduate Teaching Assistant (January 2023 - May 2024)
Georgia Institute of Technology Atlanta, GA, USA
Course Assisted: Physics 2211 - Matter and Interactions (Spring 2023, Fall 2023 & Spring 2024)
Conducted bi-weekly lab experiment and recitation sessions for an average class size of 60 students. Consistently rated 4–5/5 in student evaluations across all metrics, reflecting strong teaching impact.
Lab Instructor (July 2021 - December 2021)
Habib University, Karachi, Pakistan
Designed and instructed labs in Physics 101 and Basic Electronics, strengthening students’ grasp of
fundamental physical principles and electronic circuits.
Undergraduate Teaching Assistant/Peer Tutor (January 2019 - May 2021)
Habib University, Karachi, Pakistan
Courses Assisted: Calculus II (Spring 2019), Engineering Mathematics (Fall 2019), Electrical Machines
(Spring & Fall 2020), Mechanics & Thermodynamics (Spring 2020), Probability & Statistics (Spring
& Fall 2020), Electric Network Analysis (Spring 2021)
Managed teaching responsibilities for classes of 30–60 students, encompassing grading, assignment
development, recitation and revision sessions, and individual tutoring support.
GTA Lab
Education
Georgia Institute of Technology
M.S. in Robotics | Janunary 2023 – May 2024 | CGPA: 4.00/4.00
Coursework: Introduction to Robotics Research, Robotics, Machine Learning, Deep Learning, Deep Reinforcement Learning for Intelligent Control, Machine Vision, Linear Control Systems, Artificial Intelligence, Robotics Professional Prep Seminar 1–3, Robotics Capstone Project 1 & 2
B.S. in Electrical Engineering | Minors: Physics and Mathematics | August 2017 – June 2021 | CGPA: 3.82/4.00 | Major Rank: 03/37
Selected Coursework: Feedback and Control Theory, Computer Vision, Mobile Robotics, Instrumentation,
Linear Algebra, Probability and Statistics, Calculus, Engineering Mathematics, Engineering Design